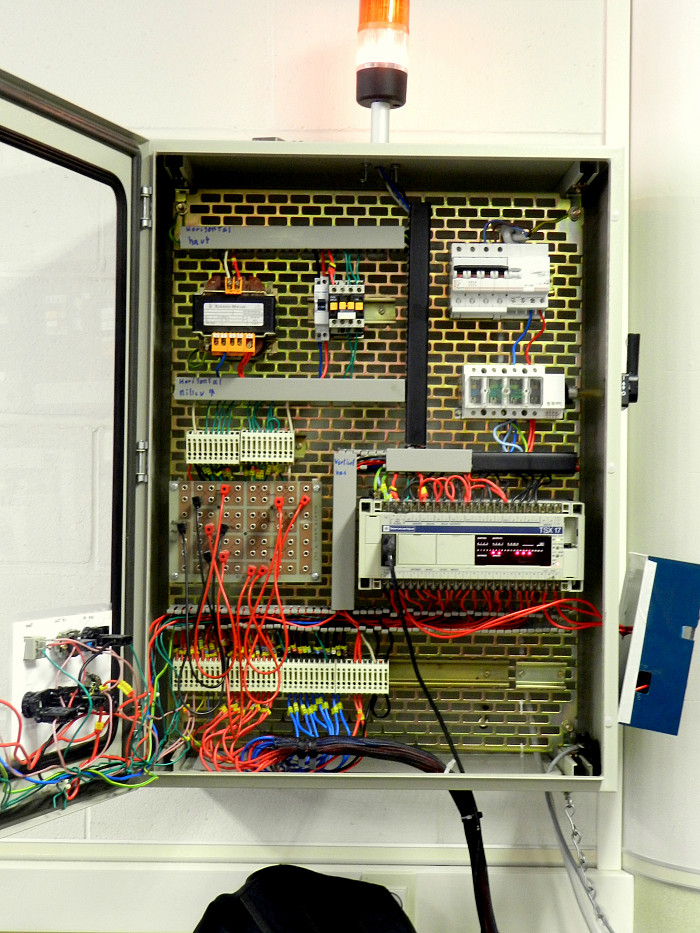
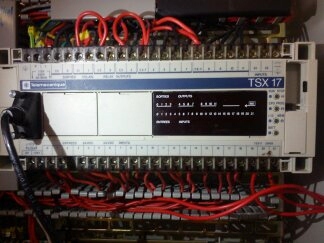
Afin de mieux comprendre le principe de progrmmation, il est important de comprendre le fonctionnement de l'API (=Automate Programmable Industriel ou application Programming Interface). L'automate programmable, recoit les informations relatives à l'état du système et puis commande les pré-actionneurs suivant le programme inscrit dans sa mémoire. Il est connecté aux autres éléments, par des liaisons parallèles appelées "Bus" qui véhiculent les informations sous forme binaire.
Analyse du fonctionnement :
Le bras manipulateur saisit des pièces brutes au tapis roulant, pour les déposer à l'entrée d'usinage. Les pièces en ressortent de trois tailles différentes :
- Les pièces de taille A doivent être dirigées dans la caisse A.
- Les pièces de taille B doivent être dirigées dans la caisse B.
- Les pièces de taille C doivent être dirigées dans la caisse C.
A l'état initial, la pince est ouverte, le bras rétracté, le poignet est à l'horizontale, et le Schrader est à sa position la plus haute et sa base peut être à n'importe quelle position.
Priorité :
Le chargement de l'usinage est prioritaire sur son déchargement :
| ppu1 | ppu2 | S1 | S2 |
| 0 | 0 | 1 | 0 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 |
ppu1 = Présence Pièces Usinage Entrée
ppu2 = Présence Pièces Usinage Sortie
S1 = Chargement (Tapis ppt => Usinage ppu1)
S2 = Déchargement (Usinage ppu2 => Rangement)
Toutes les manipulation se font en v2, bras rentré (h0).