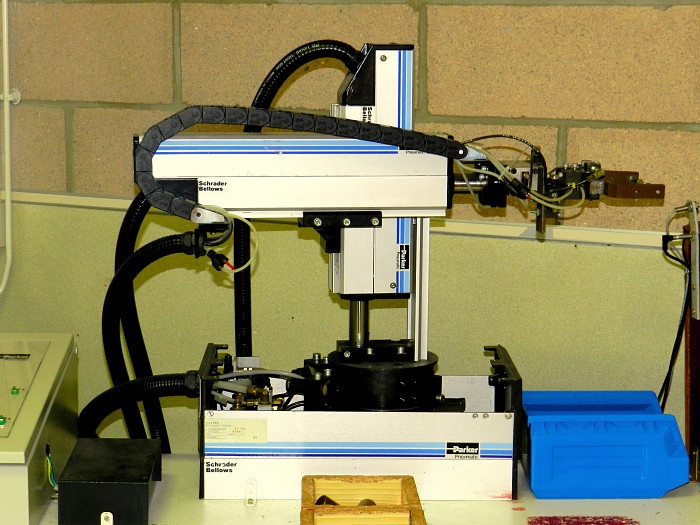
Les robots du type du Schrader Bellows sont notamment utilisés en usines pour le déplacement de pièces. Schrader Bellows possède un mode de fonctionnement manuel et programmé. Il se compose de nombreux vérins, permettant de réaliser des fonctions diverses et variées. L'utilisation principale dans l'industrie est le tri de pièces, le Schrader Bellows possède des capteurs implantés dans le support de pièces, ce qui lui permet de trier les pièces selon leur taille. Ce robot possède un grand avantage, il évoluera selon les applications demandées.
I. La pince :
Dans cette étude, nous souhaitons déplacer à l'aide de la pince du bras manipulateur des pièces cylindriques sur une chaîne de production automatisée. L'appréhension des pièces cylindriques est actuellement réalisé par des mors standards, se déplaçant à l'aide d'une liaison glissière. Les mors sont actuellement en forme de "L":
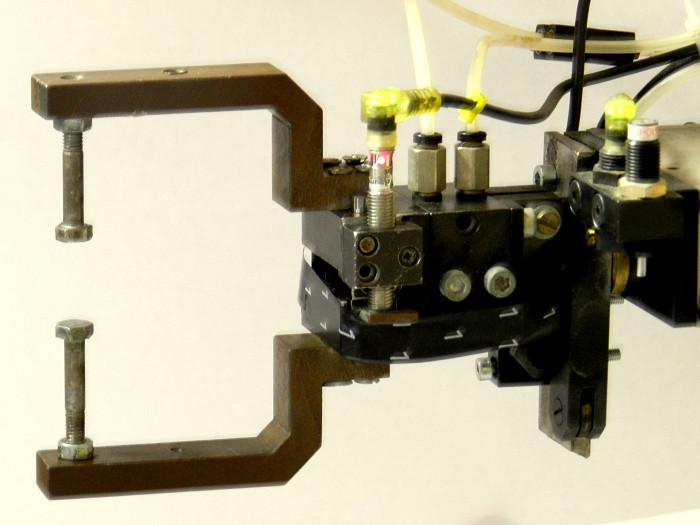
Afin de mieux maintenir ces pièces, nous allons modifier ces mords permettant la prise complète de la pièce en question, c'est à dire une pince, maintenant la pièce en 4 points.
II. Le tri des pièces :
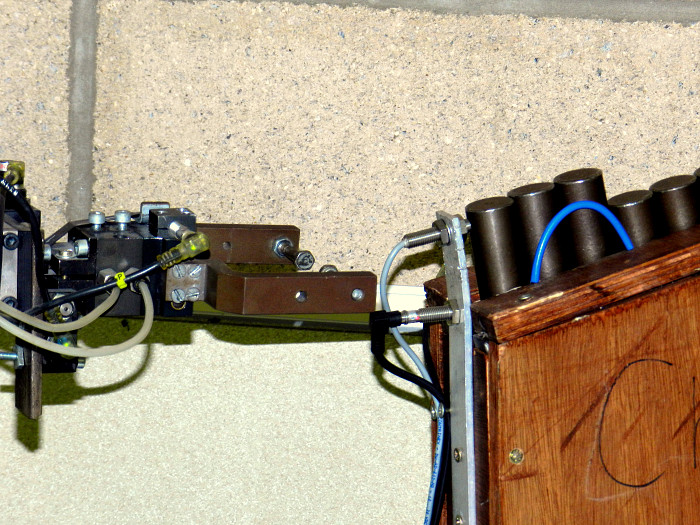
Le Schrader que nous disposons, trie les pièces selon leur hauteur, à l'aide d'un capteur inséré sur le boitier où se situe les pièces.
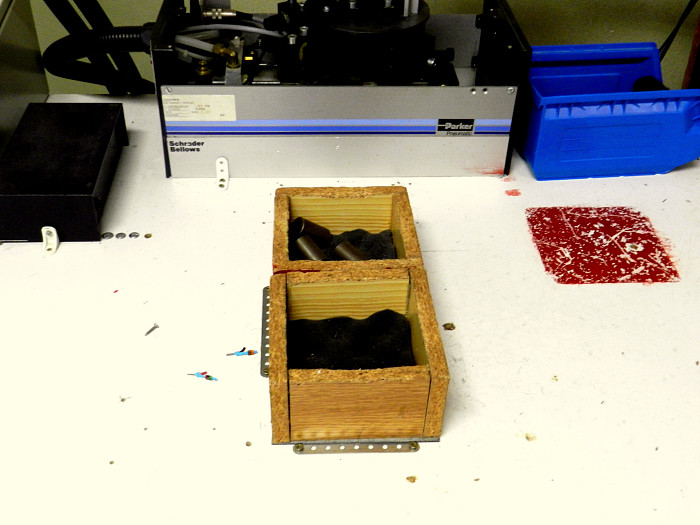
Actuellement, une fois que le Schrader a obtenu l'information de la hauteur de la pièce il le dispose dans des boîtes. Une corespondant aux petites pièces et la seconde, aux grandes pièces.
Dans cette étude, nous souhaitons également, que le Schrader, à l'aide des capteurs soit capable de trier les pièces automatiquement selon l'écartement des pinces.